Пояснительная записка (в программе Word) 130 с., 27 рис., 31 табл., 29 источника
Чертежи (в программе Компас) 10 листов чертежей
ВУЗ УрГАУ
Спецификация 9 листов
Содержание
Введение
1 Технико-экономическое обоснование
1.1 Краткая характеристика предприятия ЗАО АПК «Белореченский»
1.2 Машинно – тракторный парк ЗАО АПК «Белореченский»
2 Назначение и расчет рулевого управления
2.1 Требования, предъявляемые к рулевому управлению
2.2 Анализ известных конструкций рулевого управления
2.2.1 Рулевой механизм червячного типа
2.2.2 Рулевой механизм типа “винт-гайка-сектор”
2.2.3 Рулевой механизм реечного типа
2.3 Электромеханический усилитель рулевого управления (ЭМУРУ)
2.4 Виды рулевых реек
2.5 Расчет рулевого управления
2.5.1 Кинематический расчет рулевого трехзвенника
2.5.1.1 Определение максимального угла поворота передних колес по условию обеспечению радиуса поворота
2.5.1.2 Выбор длины поворотного рычага
2.5.1.3 Длина и положение боковых тяг
2.5.1.4 Расчет рулевого трехзвенника
2.6 Расчет параметров зацепления “шестерня-рейка”
2.6.1 Передаточное число рулевого управления
2.6.2 Исходные данные
2.6.3 Определение угла наклона зуба шестерни для минимального угла профиля зуба рейки αmin и числа зубьев шестерни
2.6.4 Определение угла наклона зуба шестерни
3 Разработка технологического процесса диагностирования и ремонта механизма рулевого управления
3.1 Снятие и установка рулевого управления на автомобиль
3.2 Проверка механизма рулевого управления
3.3 Характерные неисправности рулевого управления
3.3.1 Основные неисправности рулевого управления и их причины
3.3.2 Проверка рулевого управления
3.3.3 Особенности технического обслуживания рулевого управления с гидроусилителем
3.3.4 Проверка гидросистемы
3.4 Планировка производственного участка по ремонту рулевого управления
4 Разработка стенда для проверки развал-схождение колес грузовых автомобилей
4.1 Обоснование работы
4.2 Анализ существующих конструкций
4.3 Техническое описание разрабатываемой конструкции
4.4 Методика изготовления диагностического устройства конструкции
4.5 Описание и принцип работы канавного пневматического подъемника для вывешивания колес автомобиля
4.6 Порядок работы
4.7 Характер нагружения пневмопривода
4.8 Расчет силового пневмоцилиндра
4.9 Расчеты на прочность
4.9.1 Уплотнения
4.9.2 Проверка штока пневмоцилиндра
4.9.3 Проверочный расчет крепления задней стенки и корпуса пневмоцилиндра
4.10 Теоретическое определение взаимосвязи углов развала и схождения
5 Безопасность жизнедеятельности
5.1 Безопасность работы стенда
5.2 Структурно-конструкторская функция
5.3 Потоковая функция
5.4 Размерная функция
6 Охрана окружающей среды
6.1 Правовая охрана окружающей среды в современных условиях
6.2 Анализ природоохранной деятельности ЗАО АПК «Белореченский» и рекомендации по оздоровлению экологической ситуации
6.3 Экологическая экспертиза внедряемой разработки
7 Экономическая эффективность работы
Заключение
Список использованных источников
Дополнительные материалы: доклад к выпускной квалификационной работе на 4 листах.

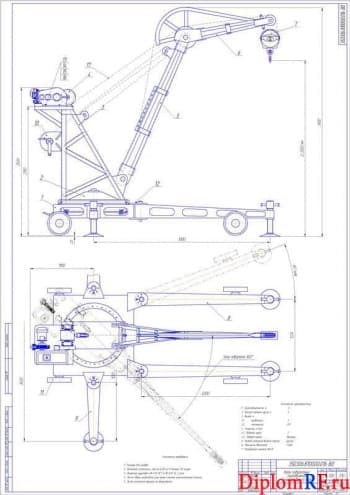
Проект участка ТО с разработкой гаражного домкрата
Код: 01.01.06.01.50Чертежи (в программе Компас) 5 листов

Ремонт машин с разработкой восстановления коленчатых валов
Код: 01.01.06.01.48Чертежи (в программе Компас) 10 листов

Восстановления геометрии и устранение недостатков кузовов грузовых автомобилей
Код: 01.01.06.01.47Чертежи (в программе Компас) 9 листов

Совершенствование ремонта с разработкой стенда для проверки муфт стартеров
Код: 01.01.06.01.19Чертежи (в программе Компас) 17 листов плакатов и чертежей

Совершенствование ТО и ТР автотранспортных средств с разработкой кантователя ДВС
Код: 01.01.06.01.18Чертежи (в программе Компас) 12 листов

Ремонт автотранспорта с разработкой механической отвертки
Код: 01.01.06.01.17Чертежи (в программе Компас) 19 листов