Содержание
Введение
5. Анализ возможностей экскаватора по транспортированию грузов в челюстном ковше
5.1. Введение
5.2. Обзор инженерной информации о теории процесса взаимодействия Р.О. со средой
5.3. Анализ эффективности процесса взаимодействия Р.О. со средой
5.4. Выводы
6. Технологический раздел:
6.1 Групповой метод обработки деталей на револьверных станках
6.2 Проектирование групповых технологических процессов
6.3 Метод групповой обработки деталей
7. Производственная и экологическая безопасность
7.1 Расчет на устойчивость
7.2 Определение экологического ущерба
8. Технико – экономическое обоснование проекта:
8.1 Расчёт показателей в сфере производства машин и оборудования
8.2 Порядок определения прочих показателей
8.3 Определение эксплуатационной производительности машины
8.4 Определение годовых затрат на эксплуатацию
8.5 Построение карты безубыточности
8.6 Прогноз доходов и расходов
8.7 Оценка эффективности реализации проекта
Список литературы
Приложения
Состав чертежей
- Плакат затраты и результаты в сфере производства (формат А2)
- Плакат безопасность жизнедеятельности (формат А1)
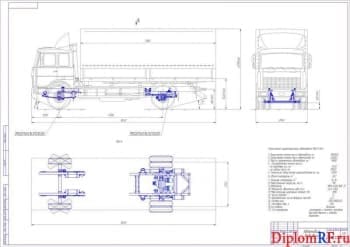
- Чертеж общего вида экскаватора-планировщика на шасси МАЗ (формат А1)
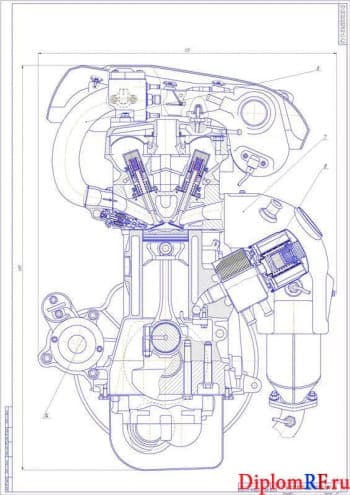
- Чертеж сборочный оборудования (формат А1)
- Чертеж сборочный оборудование рабочее (формат А1)
- Эскизы операции технологического процесса (формат А1)
- Эскизы операции технологического процесса 2 (формат А1)
Описание
В дипломной работе рассматривается задача создания универсальной машины для земляных работ, способной выполнять широкий спектр операций на объектах, расположенных в черте города. В том числе – разбор завалов, оставшихся после демонтажа или разрушения здания. Будет рассматривать работу экскаватора при разборке завалов.
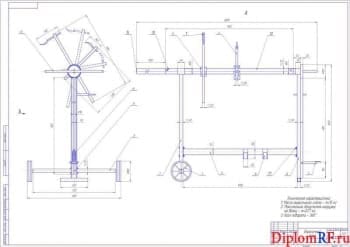
Экскаватор своим ходом доставляется к месту проведения работ, где выставляется на внешние опоры. Экскаваторщик выбирает объект, который требуется переместить (как правило, часть железобетонной плиты или кирпичной кладки), и подводит под него ковш с поднятой челюстью. Затем при помощи челюсти объект фиксируется в ковше и переносится на другое место или в транспортное средство.
Необходимо выявить пределы возможностей захвата объектов, оставшихся после разрушения здания, при помощи челюстного ковша.
В представленном дипломном проекте была выполнена разработка экскаватора-планировщика на шасси МАЗ. Проанализированы возможности экскаватора по транспортированию грузов в челюстном ковше. Проведены обзор инженерной информации о теории процесса взаимодействия Р.О. со средой, а также анализ эффективности процесса. Рассмотрены два случая захвата объекта ковшом, определены силы реакции опоры, трения и сила на гидроцилиндре.
Очевидно, что транспортирование можно осуществлять не только, когда объект расположен строго горизонтально или вертикально. При переноске объекта под каким-то углом относительно горизонта он будет удерживаться в ковше, как за счёт сил трения, так и вследствие противодействующего опрокидыванию объекта действия челюсти. С другой стороны, обе эти составляющие будут меньше, чем в рассмотренных примерах. Так что в дальнейшем есть необходимость определения зависимости максимального веса объекта, который может переместить экскаватор, от угла положения ковша.
В технологическом разделе проекта описан групповой метод обработки деталей на револьверных станках. Изучены основные вопросы производственной и экологической безопасности. Выполнен расчет на устойчивость, определен экологический ущерб. Дано технико-экономическое обоснование дипломного проекта. Выполнен расчет показателей в сфере производства машин и оборудования. Определены годовой объем продаж, зарплата персонала и материальные издержки. Построена карта безубыточности и рассчитаны отражаемые на ней показатели. Проведен прогноз доходов и расходов, составлена таблица с полученными данными. Дана оценка эффективности реализации проекта.
В графической части дипломного проекты были выполнены чертежи рабочего оборудования и технологического процесса. Записка не в полном составе – только с 5 раздела.