
Пояснительная записка (в программе Word) 23 страницы, 6 литературных источников
Чертежи (в программе Компас 3Dv) 2 листа, спецификация
ВУЗ Омский государственный технический университет
Описание
В курсовой работе по дисциплине металлорежущие станки и инструменты выполнен анализ поверхностей детали и методы их геометрического образования, представлена разработка и кинематический расчет коробки скоростей горизонтально-фрезерного станка.
Создание современных, точных и высокопроизводительных металлорежущих станков обуславливает повышенные требования к их основным узлам. В частности, к приводам главного движения и подач предъявляются требования: по увеличению жёсткости, повышению точности вращения валов, шпиндельных узлов. Станки должны обеспечивать возможность высокопроизводительного изготовления без ручной последующей доводки деталей, удовлетворяющих современным непрерывно возрастающим требованиям к точности.
В большинстве станков в качестве привода главного движения применяют коробки передач со ступенчатым регулированием частоты вращения, соединённые с асинхронным электродвигателем. К приводам главного движения предъявляют следующие требования: обеспечение необходимой мощности резания, сохранение постоянства мощности резания в коробках скоростей и крутящего момента, обеспечение заданного диапазона регулирования скорости, высокий КПД, надёжность, простота обслуживания и малые размеры.
Между наибольшей и наименьшей частотами вращения шпинделя промежуточные частоты могут быть расположены бесступенчато (плавно) или ступенчато (прерывисто). Применение бесступенчатого регулирования частоты вращения даёт возможность более просто осуществить оптимальные режимы резания. С применением бесступенчатого регулирования конструкция станка упрощается. В качестве электрического бесступенчатого привода применяют электродвигатели постоянного тока.
Ступенчатое регулирование даёт возможность установить ограниченное число частот вращения в заданных пределах. По этой причине величина регулирования не всегда может быть установлена оптимальной. Механизмы со ступенчатым регулированием компактны, просты и имеют более высокий КПД по сравнению с бесступенчатым регулированием.
На фрезерном станке можно обрабатывать плоские поверхности. Для того чтобы получить заданные поверхности необходимо иметь образующую и направляющую линии соответствующей формы и длины.
Проектируемый станок по кинематической структуре относится к классу Э22 и состоит из нескольких частных структур. Каждая из этих структур содержит кинематические группы для двух исполнительных движений:
– движения резания Фv(В) и движения подачи – продольной Фs1 (П2 ) , попе-речной Фs 2 (П3 ) или вертикальной Фs 3 (П4 ) .
Структурная схема проектируемого станка:
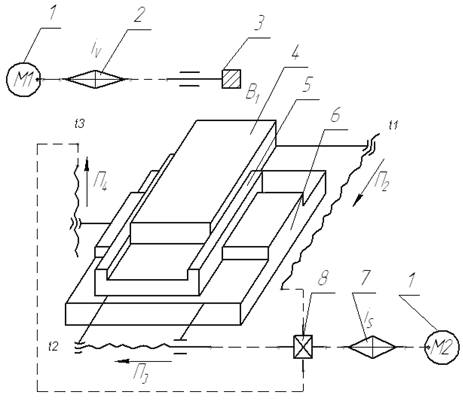
Кинематическая группа движения резания Фv(В1) – простая. Ее внутренняя связь состоит из одной кинематической вращательной пары между шпинделем фрезы и станиной. Внешняя кинематическая связь с органом настройки iv находится между источником движения М1 и шпинделем. Кинематическая группа движения продольной подачи Фs1 (П2) – простая, с внутренней связью в виде поступательной кинематической пары между столом и поперечными салазками и внешней кинематической связью: источник движения М2 → iS → ходовой винт с t1.
Кинематическая группа движения поперечной подачи Фs2 (П3 ) – тоже про-стая, с внутренней связью в виде поступательной кинематической пары между поперечными салазками и консолью и внешней кинематической связью: источник движения М2 → iS → ходовой винт с t2.
Кинематическая группа движения вертикальной подачи Фs3 (П4 ) – про-стая, с внутренней связью в виде поступательной кинематической пары между консолью и станиной и внешней кинематической связью: источник движения Д2 → iS → ходовой винт с t3.
1 – Источник движения (двигатель), 2 – Коробка скоростей, 3 – Фреза, 4 – Стол, 5 –Салазки , 6 –Консоль, 7 –Коробка подач, 8 – Реверсный механизм

Проектирование и расчет привода главного движения токарно-револьверного станка модели 1П365
Код: 02.01.03.05.78Чертежи (в программе Компас 3Dv и AvtoCAD) 3 листа

Проектирование коробки скоростей горизонтально-фрезерного станка
Код: 02.01.03.05.77Чертежи (в программе Компас 3Dv) 3 листа, спецификация

Проектирование привода горизонтально-фрезерного станка
Код: 02.01.03.05.76Чертежи (в программе Компас 3Dv) 4 листа, спецификация

Проектирование привода главного движения токарного станка с ЧПУ модели 16Б16Т1
Код: 02.01.03.05.75Чертежи (в программе Компас 3Dv) 3 листа, спецификация на чертежах

Проектирование привода главного движения горизонтально - фрезерного станка модели 6Р82
Код: 02.01.03.05.74Чертежи (в программе Компас 3Dv) 3 листа, спецификация

Разработка РТК на базе станка мод. 16К20Ф3 для обработки детали типа «втулка» с выбором ТНС и ПР
Код: 02.01.03.05.73Чертежи (в программе Компас 3Dv) лист